"comprehendere scire est"

Consejo Nacional para el Entendimiento Público de la Ciencia.
Consejo Nacional para el Entendimiento Público de la Ciencia.
José De Jesús Medel Juárez + Centro De Investigación En Computación; Romero Urbieta Parrazales + Centro De Investigación En Ciencia Aplicada Y Tecnología Avanzada; Gabriel Hernández López + Universidad Panamericana
Introducción
La evolución de la mecatrónica se puede ilustrar con la evolución del automóvil, ya que a mediados del siglo pasado dentro del auto-móvil, el radio era el único compo-nente con funcionamiento electróni-co. Todas las demás funciones eran enteramente mecánicas y eléctricas. En la evolución de la tecnología, actualmente el automóvil tiene más de 5 micrcontroladores, mínimo 6 motores eléctricos y más de 20 kilogramos de cables, todos ellos en promedio, además de los sensores, cientos de líneas de software, ma-nejadores y actuadores, controlado-res digitales, relevadores entre otras. [1,2,3,4]
Desarrollo
En un principio las funciones de monitoreo y control en el automóvil fueron mecánicas y eléctricas, se puede poner como ejemplo: el ajus-te de los espejos, el cambio de velo-cidades, el prender las luces, el ajustar el asiento del conductor, el poner la calefacción o el aire acondi-cionado entre otros elementos. No se contaban con sistemas digitales para sistemas móviles, es más en los diseñadores de aquel entonces no consideraban el usar una computa-dora dadas las dimensiones de las mismas (cuartos enteros con siste-mas de enfriamiento, con muchas personas cuidando sus condiciones de operación, evitando las vibracio-nes entre otros de los múltiples detalles que hacían imposible consi-derar que hubiera una computadora en un automóvil, menos aún, controlarlo e interactuar con el conductor).
[5]
Todavía era muy temprano para
considerar a los sistemas inteligen-tes de monitoreo, control y de segu-ridad. En esos inicios todos los sistemas eran ajustados ya sea mecánica o eléctricamente, y que-dando en operación a ojo de buen cubero, siendo para cada automóvil una condición de operación óptima al gusto del cliente.
Los problemas existentes en los motores de combustión, tales como optimización en el uso del combusti-ble, la inyección adecuada de aire, la cantidad de gases generados, la forma de vibrar, el ruido que gene-raban, la forma de enfriarlos, la manera en que debería hacerse circular los líquidos de enfriamiento, el cómo lograr que permaneciera en operación bajo diferentes circuns-tancias, el cómo lograr que se dismi-nuyera la cantidad de consumo de combustible, entre otras necesida-des. [6]
Se pensó primeramente en mejorar los sistemas de inyección, desde el uso del carburador, turbo cargado-res, inyectores, entre otros sistemas mecánicos, eléctricos y electro-mecánicos; pero al final el que dictaba cómo se tenía que inyectar el combustible sería el pedal del con-ductor a una mezcla aire combustible, constante para cualquier condición de viaje.
Muchas veces se llegó a escuchar que la gente al viajar en su auto, comentaba que este cascabeleaba, que no tenía la potencia adecuada. Para evitar esta clase de problemas se consideró poner un altímetro integrado al carburador que se en-cargaba de modificar la relación de la mezcla de acuerdo a la altura a que se estuviera operando el motor, por medio de la regulación de la apertura del papalote superior del carburador. [7]
Las bujías, encargadas de prender la mezcla aire combustible después de haber sido comprimida por uno de sus cilindros, requería un proceso de sincronía, proceso generado entre el árbol de levas y el cigüeñal que movía a los cilindros, entre los cuales era conectado el distribuidor, quien se encargaba de enviar el voltaje necesario a la bujía para hacer la chispa dentro del proceso antes mencionado ( En el caso de los motores diesel en lugar de la bujía solo es necesario hacer estallar la mezcla aire combustible, por medio de la compresión que sobre ella se hace).
El distribuidor es el cargado de dar la sincronía de prendido de la mezcla aire combustible por medio de las bujías en un orden específico.
Desafortunadamente el proceso de combustión de un motor de com-bustión interna, no era eficiente, para todos los cambios de velocidad, de altitud y de condiciones ambien-tales a las cuales era sometido el automóvil.
Se pensó en un encendido eléctrico que permitiera impulsar a una mar-cha para que el motor de combus-tión interna lograra cubrir su ciclo de cuatro tiempos en cada uno de sus cilindros y que ya quedará operando de forma cíclica, desconectándose en ese momento a la marcha. Se consideró cambiar los elementos mecánicos en el distribuidor por tan solo elementos eléctricos ya que los platinos tenían múltiples proble-mas, tales como el que se carcomían sus placas de contacto; el desajuste que en él se producía por la vibra-ción de la máquina, las deformacio-nes que en él se generaban por el calor al que eran sometidos, entre otros problemas.
Se puede dedicar una monografía completa a la cantidad de problemas que se generaban en los automóviles de antaño, que no es el fin de esta investigación.
En cambio se requiere saber que la evolución tuvo que darse en el automóvil para generar el uso masivo del mismo. Al incrementarse las compañías armadoras, se requerían ofertar mejores cualidades, mayor eficiencia, un mayor con-fort, ahorro de combustible, entre otras estrategias de competencia, requiriendo del uso de la electrónica, de los procesos semiau-tomáticos y semiautomáticos, de empezar a usar los sensores, el envío de información por el sistema eléctrico, en su forma más simple por medio de código de señales [8,9].
Con la evolución de los circuitos electrónicos, de los sistemas neumáticos, de los sistemas digitales, de la portabilidad, del almacena-miento masivo de información, de una mejor-ía sustancial en los sistemas de enfriamiento, se pudo ir integrando diversas tecnologías con un mismo propósito, hacer una máquina que cubriera las expectativas del cliente final, cada vez más exigente y con menor cantidad de recursos.
Es así como se integran los sensores para censar el paso de un engrane en el tren mo-triz del motor y liberar, de acuerdo a las condiciones ambientales la mezcla óptima, así como la descarga eléctrica a la mezcla comprimida dentro del cilindro en un tiempo específico [10].
Los sistemas de frenado ahora son del tipo diferencial, con sensores hidroneumáticos que evitan el bloqueo y la cristalización de las balatas, y así la disminución de muchos acci-dentes, requiriendo de un Sistema Mínimo que permita dar una respuesta en presión de manera diferida realizando un micro frenado a máxima presión por intervalos de tiempo imperceptibles a los ojos humanos, pero de gran eficacia [11].
Con el problema del tráfico en las grandes ciudades, se ha pensado en el uso de la Inteli-gencia Artificial para lograr disminuir o elimi-nar los choques generados por la somnolen-cia ¿cómo se está resolviendo?¿Qué han tenido que aprender los sistemas mínimos?¿Cómo lograr la interacción más adecuada entre hombre y máquina?
El motor de combustión interna ha contando con múltiples aplicaciones en dos industrias: a) la industria del transporte de pasajeros ya sea masivo o individual; y b) de carga.
En ambos casos se requiere de un sistema de
transmisión que convierta la potencia generada en un diferencial de potencias para diferentes propósitos: 1) sacar a un móvil de su inercia, 2) mantener una inercia, 3) dar un incremento de potencia, etc.
Se pensó en una “caja de veloci-dades” con un embrague en el cambio de con-dición de operación del sistema de transmisión.
Ese tipo de sistemas tuvo una serie de limitan-tes, porque en muchas ocasiones Se “patinaba” el embrague cuando las pastas que en él se encontraban se cristalizaban (igual que en los frenos) y ya no podía transmitir la potencia en su estado diferencial considerado, en los auto-móviles se observaba que vibraba el auto, que se tardaba en romper su inercia, etc.
Fue así que se consideró el uso de la turbina que realizará los cambios de velocidad a través de cambios de presión considerando a las fuer-zas centrífugas y centrípetas correspondientes para cada caso.
Hace veinte años se introdujo el control en el sistema de transmisión, requiriendo de medir la potencia en las ruedas, en el sistema de transmisión, así como el del motor de combus-tión interna; se calcula el deslizamiento entre todos ellos, y se propone el número de veloci-dad a usar que lo minimice. Se observó que era necesario que en el sistema de tracción fuera considerado los cabeceos axiales en todos sus elementos, dando como resultado un comple-mento con lo considerado y que hizo que el desplazamiento de los automóviles fuera con la menor cantidad de vibraciones posibles. Para evitar el patinaje de las ruedas del automóvil se considero el uso de un regulador de potencia diferencial de acuerdo a las condiciones que el vehículo tuviera de operación, llegando hasta la combinación de estos sistemas de regulación de velocidad con el sistema de frenado ABS con el fin de lograr un desempeño y control desea-dos [12,13].
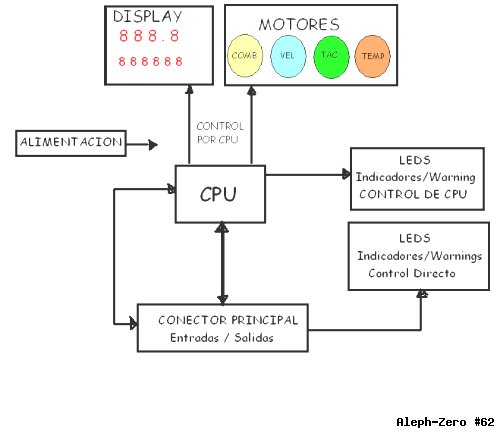
Para integrar los diferentes sistemas que hicie-ron que el automóvil adquiriera las condiciones de seguridad y operación que actualmente
tienen, fue necesario integrarlos a un sistema central por medio de una CPU, con sistemas de control que van desde el del PID hasta los modos deslizantes, priorizando las operaciones con el motor y el sistema de frenado. Cada subsistema debería de contar con un micro-controlador con memoria EEPRO, con entradas y salidas tanto analógicas como digitales, circuitos PWM, con núcleos operados por prioridades. Hasta llegar a los micro-controladores que regulan el ajuste de los espejos como de la posición e intensidad de las luces.
La integración de los sistemas mecánicos, con los sistemas hidráulicos, eléctricos, electrónicos, a través de sistemas digitales mínimos integrados con sistemas de monitoreo y control permitió ver al todo como un sistema de operación conocido como sistema mecatrónico, que de manera ilus-trativa se observa en la Fig 1.
Es así como la Mecatrónica se convirtió en la herramienta integradora de la operación adecua-da de un automóvil, cada vez con mejoras que permitan brindar al usuario final mejores condi-ciones de viaje.
El mercado de los automóviles presentó una alta correlación entre mayor Mecatrónica mayores fueron las ventas. Circunstancia que afectó los mercados mundiales relacionados, que provoca-ron la crisis económica de finales del siglo pasado. Tal que las características mecatrónicas son el diferenciador en el producto de consumo. En la Fig 2., se observa el sistema mecatrónico operan-do a través de una PC.
La innovación, así como la integración de más componentes de monitoreo y control, permitirán brindar viajes más seguros y con mayor confort, al realizar casi todas las operaciones del sistema Mecatrónico. El paso ahora más importante, es el lograr que los sistemas mecatrónicos permitan operar los automóviles de manera autónoma, adaptable e inteligente, buscando la menor pérdi-da de tiempo y de energía en llegar de un punto a otro, con la colaboración de la ubicación global.
Para afrontar de mejor manera el proceso de automatización global de los sistemas del automóvil, se requiere de las redes de trans-misión de señales tanto alámbrica como inalámbrica para comunicarse entre auto-móviles vecinos, así como en los diferentes sistemas que lo compone, requiriendo de la integración de la Mecatrónica con la telemá-tica, para el uso de los diversos protocolos de comunicación, interfaces, y herramientas de software que permiten una ubicación global, puntual y vecinal, información que le servirá al sistema mecatrónico para la toma de deci-siones, que le ayuden a la obtención de la autonomía del móvil en un ambiente acotado con cambios dinámicos acotados. Es el caso de los automóviles de la Fig 3., en donde ellos cuentan con una ubicación global así como local por el sistema de radares con que cuen-tan, con desplazamientos que son monitorea-dos por radares, y que siempre les permite contar una distancia relativa constante.
Ahora con el desarrollo de los sistemas ci-
croeletrónicos (MEMS), se ha des-arrollado dentro de la industria automo-triz tanto sensores como actuadores con un bajísimo consumo de energía, y que forman parte de la red mecatróni-ca; se tiene como ejemplo los aceleró-metros instalados en las bolsas de aire de seguridad, la red de sensores de calenta-miento en el interior del automóvil, para la operación del aire acondicionado, entre otros ejemplos. Los sistemas de radares radiales a través de frecuencias altas permiten detectar la posición de los vehículos, la distancia a las barreras en el camino, que en forma indirecta y por el efecto Doppler, se determina la veloci-dad diferencial entre los automóviles vecinos
para saber cómo se para, si rebaza, si baja la velocidad, todo ello acoplado al sistema mecatró-nico que opera al sistema de frenado y de acelera-ción de acuerdo a un criterio establecido para la toma de decisiones lo más adecuadas posibles. Como puede verse en la Fig. 4., en el sistema de control por radar, contando con una referencia y una posición actual; en esa misma figura de mane-ra ilustrativa se incluye el sistema radar operando dentro de un automóvil, con obstáculos al frente.
Se ha visto hasta ahora que la evasión de obstácu-los requiere de mucho entrenamiento y a pesar de ello solo se ha logrado un resultado aceptable cuando la velocidad de translación y la velocidad relativas son muy bajas. Por ello la asistencia del usuario, ayuda a una conducción casi automática, ya que en el tablero se le avisa al conductor cuán-do será mejor realizar un rebase
sin ningún contratiempo; claro está que el con-ductor tiene que cerciorarse de que no habrá ningún contratiempo [14,15,16,17,18,19,20,21,22].
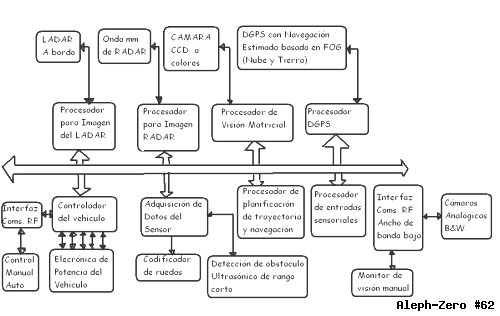
La operación en tiempo real tanto del moni-toreo y control usando a la telemática y a la Tecnología MEM, con el apoyo de radares, GPS, ABS, controladores de los dispositivos mecánicos e hidráulicos interactuando por medio de la inteligencia artificial, permitirá el desarrollo de rutas dinámicas.
En la Fig 5., se describe por medio de un diagrama a bloques la operación del sistema mecatrónico dentro de un automóvil.
Parece que los sistemas mecatrónicos dentro del automóvil requerirán mayor cantidad de elementos, que transformarán la visión de esta clase de herramientas, siendo necesario preguntar ¿serán necesarios los parabrisas? ¿La configuración actual de los asientos es la adecuada? ¿La forma de estacionamiento actual es la más eficiente o requerirá ade-cuarse a las nuevas tecnologías? ¿Las aveni-das, carreteras y demás vías de uso de los automovilistas requerirán de MEMS que interactúen con los automóviles? Dentro de todo ello se requiere preguntar ¿la mecatró-nica ayudará a disminuir las emisiones conta-minantes así como la cantidad de tráfico? ¿El tamaño de los automóviles, dadas las condi-ciones actuales, serán de una sola plaza, logrando los mini-automóviles y el ensamble entre ellos para formar un automóvil fami-liar?
Es así que el automóvil como un sistema mecatrónico requiere estar en armonía con la sociedad y brindad cada vez mayores benefi-cios ecológicos como transporte ¿cómo lo-grar que la ciencia desarrollada en los centros de investigación sea integrada dentro de los automóviles mecatronizados?
Es un problema a resolver por las generacio-nes inmediatas de científicos, tecnólogos, empresarios y sociedad en general tales como los grupos ecologistas; buscando que este medio de trasporte sea de la mejor calidad, al menor precio, máxima seguridad y cada vez menos contaminante [23].
Conclusión
En este trabajo se presentó el cómo se estaba integrado un automóvil entre sus diferentes herramientas para que pudiera operar de una manera accesible para el usuario final. La tecnología permitió que los sistemas de mo-nitoreo y control evolucionaran y estuvieran interconectados hasta llegar a forma todo un sistema en el que se busca la optimización de los recursos y dar el mejor ahorro y máximo confort al usuario; a toda esa integración se
le considera como la descripción de la Mecatró-nica Automotriz.
En las figuras se pueden observar algunos de los sistemas de control, el sistema maestro de monitoreo y control y el sistema de control de distancia, como ejemplos de un sistema mecatrónico.
Dr. José de Jesús Medel Juárez Profesor Investigador del Centro de Investigación en Computación y del Centro de Investigación en Ciencia Aplicada y Tecnología Avanzada, ambos del Instituto Politécnico Nacional. Miembro de la Academia Mexicana de Ciencias. Con más de 60 publicaciones internacionales (JCR; ISI, Latindex, entre otros índices), más de 15 estudiantes graduados de posgrado (maestría y doctorado), tres libros actualmente agotados (Introducción a los Sistemas de Tiempo Real, Temas Selectos de Tiempo Real, Sistemas con Lógica Difusa). Ha sido profesor de Mecatrónica (desde un punto de vista teórico) en diferentes instituciones de educación superior. M en C. Romeo Urbieta Parrazales. Profesor Investigador del Centro de Investigación en Computación del Instituto Politécnico Nacional. Es un especialista dedicado sistemas embebidos, electró-nica de potencia y control digital de procesos. Actualmente, integra sistemas de monitoreo y control a través de sistemas de comunicaciones mínimos. Dr. En T. A. Gabriel Hernández López Profesor e investigador de la Universidad Panamerica-na, cuenta con estancias de investigación en Canadá, Estados Unidos y Europa, relacionados a los procesos industriales, a la automatización e instrumentación de sistemas y procesos. Dentro de los desarrollos logrados, cuenta con el diseño e integración de un tren motriz sin engranes.

Divulgadores. María del Carmen Navarro-Rodríguez +Centro Universitario de la Costa , Campus Vallarta, Departamento de Ciencias Biológicas; Universidad de Guadalajara; Luis Fernando González Guevara + Campus Vallarta, Departamento de Ciencias Biológicas; Universidad de Guadalajara; Ramiro Flores Vargas + Centro Universitario de la Costa Sur, Departamento de Estudios para el Desarrollo Sustentable de Zonas Costeras, Universidad de Guadalajara..
Divulgadores. Said R Casolco + ; Erick G. Álvarez G + ; A. L. Tamayo Huerta + ; Yenisey Mendoza Martínez + ; Carlos Santana Velázquez + Instituto Tecnológico Y De Estudios Superiores De Monterrey, Campus Puebla.
Divulgadores. Joan Josep Solaz-portolés + Departament De Didàctica De Les Ciències Experimentals I Socials.universitat De València. España.
Divulgadores. Brenda Sosa Reyes + .
Divulgadores. Gilberto Sandoval Fregoso + Universidad Autónoma Metropolitana, Unidad Xochimilco.
Editorial. Dr. Miguel Ángel Méndez Rojas + ;.
Educadores. Dr. Carlos Humberto Sierra Becerra + .
Investigación. Noé Villegas + Facultad De Ingeniería, Ciencias Y Arquitectura, Universidad Juárez Del Estado De Durango; Betty De Los Ríos + ; Antonio Aguado + Department Of Construction Engineering, Polytechnic University Of Catalonia, Barcelona, España.
Tecnólogos. José De Jesús Medel Juárez + Centro De Investigación En Computación; Romero Urbieta Parrazales + Centro De Investigación En Ciencia Aplicada Y Tecnología Avanzada; Gabriel Hernández López + Universidad Panamericana.
Tecnólogos. Mati Orlando Arzola Garza + Facultad De Ingeniería Mecánica Y Eléctrica, Barranquilla ; Ing. Olga Maricela Preciado Martínez + ; Ing. Angel Zárate Martínez + ; Mati Alicia Guadalupe Valdez Menchaca + Facultad De Ingeniería Mecánica Y Eléctrica, U. A. De C; Mónica Lizzeth Borrego Quiñonez + Estudiante De La Carrera De Ingeniero En Sistemas Computacionales, F.i.m.e. De La U. A. De C..