"comprehendere scire est"

Consejo Nacional para el Entendimiento Público de la Ciencia.
Consejo Nacional para el Entendimiento Público de la Ciencia.
Jorge Salvador Valdez Martínez + ; Gustavo Delgado Reyes + Escuela Superior De Ingeniería Mecánica Y Eléctrica Unidad Culhuacan– Ipn; Pedro Guevara López + Centro De Investigación Ciencia Aplicada Y Tecnología Avanzada Unidad Legaria – Ipn
Introducción
En 1840 se hizo la primera demostración de transmisión de datos usando el telégrafo. Con esto, la percepción de las distancias que había de un poblado a otro “disminuían” por el efecto de proximidad que ofrecia este invento. Despues se dio a conocer al teléfono en 1876, y en 1901, se logró la primera transmisión de radio. Dos años mas tarde, se presento el Telekino (Quevedo,2003). Este artefacto fue desarrollado por Leonardo Torres Quevedo en 1903 y consistía en un autómata que ejecutaba órdenes transmitidas mediante ondas hertzianas; el experimento consistió en hacer maniobrar un barquito en una vasija llena de agua y colocada en el anfiteatro de la Academia (España) demostrándose que el pequeño navío podía moverse en todas direcciones.
Después en 1905, Torres Quevedo lo presento a la Academia de Ciencias de París con una nota acompañada de los aparatos de demostración de un sistema que había ideado (Quevedo,2003):
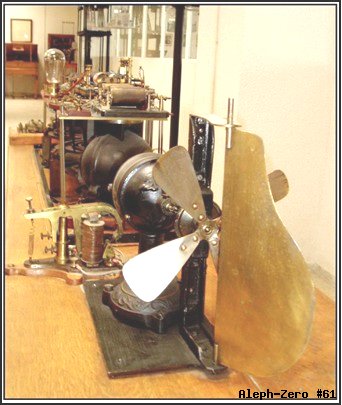
“… Los aparatos de demostración que tengo el honor de presentar a la Academia (una caja con una hélice y un timón dirigidos a distancia por medio de la telegrafía sin hilos) constituyen un sistema al cuál denomino Telekine destinado a dirigir desde lejos la maniobra de una máquina por medio del telégrafo con o sin conductores…”
Anteriormente se habían presentado algunos experimentos semejantes (Torpedos dirigidos a distancia en 1896 y en 1898), pero la limitante que tenían es que a una distancia determinada ya no podían ser controlados. El Telekino, se considera como el primer aparato de radiodirección del mundo, pionero en el campo del mando a distancia y gracias a él, se empezó a usar el término deTelecontrol.
El Telecontrol Moderno
Desde que la comunicación humana empezó a tomar como base el desarrollo de las telecomunicaciones (Por medio de radiotransmisión, satélite, microondas, fibra óptica, etc.), se han desarrollado a la par nuevas tecnologías, como lo es la computación la cual surge con la creación de la primera computadora ENIAC en 1946. Ambas se han complementado y han evolucionado, para enviar información a otros lugares dentro y fuera del planeta, logrando proezas tales como dirigir una sonda espacial desde la tierra, para ver los anillos de Saturno o las lunas de Júpiter a través de un monitor. Hoy en día, las computadoras son una parte importante de la vida cotidiana, ya que las podemos encontrar en artículos de uso diario como son los teléfonos celulares y que además cuentan con una valiosa herramienta que puede tener muchas aplicaciones, como lo es el Internet, el cual se ha visto beneficiado por el constante desarrollo tecnológico; por ello, la comunicación entre computadoras a través de este medio de comunicación es muy común y vastamente usado en la actualidad. Como una consecuencia directa de la gran revolución tecnológica de la cual somos espectadores, la información que se comparte entre estas redes inmensas de computadoras cada vez se hace de una forma más rápida, eficiente y más adecuada para poder repetir el experimento de Torres Quevedo de 1903 pero ahora usando el Internet como medio de comunicación para controlar sistemas físicos a distancia.
El telecontrol no es simplemente "Mando de un aparato, máquina o sistema, ejercido a distancia (Real,2011)". Para que un sistema físico sea controlado a distancia se deben de tener las siguientes consideraciones:
Un medio de transmisión de información proporciona una interfaz física usada para interconectar equipos o dispositivos y así crear una red que transporta datos. Los principales factores que se deben tener en consideración al seleccionar el tipo de medio de comunicación, pueden ser los siguientes (Ottermann,2001):
Un sistema de telecontrol, puede incorporar varios medios de comunicación entre la estación de control y el sistema controlado. Los cuales son (Ottermann,2001):
Comunicación por línea física. Es mediante el uso de líneas hidráulicas (Mangueras) y Neumáticas, Cableado eléctrico, Fibra óptica. Las ventajas que podría ofrecer este medio de comunicación, es su bajo costo así como la "facilidad" de instalación. Se consideran como desventajas la restricción de movimiento del operador (al estar alejado de la planta controlada) y hay limitaciones de seguridad para el medio de comunicación (se puede cortar o dañar) e incluso también hay una atenuación de la información que fluye por los canales.
Comunicación por línea no física. Es toda la tecnología inalámbrica como lo es la comunicación electromagnética y comunicación infrarroja. La comunicación electromagnética, es fácil de instalar, los costos de mantenimiento son moderados y da un nivel de confiabilidad razonable además de que puede cubrir distancias muy largas, un ejemplo de ello son los equipos de comunicación inalámbricos como pueden ser teléfonos o módems los cuales utilizan la banda de 2.4GHz. Las desventajas para este medio es que la propagación de ondas electromagnéticas pueden ser interferidas (e incluso anuladas) ya sea por un rayo o estructuras aledañas que afecten la transmisión de información (torres, antenas e incluso paredes). La propagación de la información depende de la longitud de onda y el tipo de medio sobre el cual se propaga (aire, agua, tierra), mientras que la comunicación mediante luz infrarroja como ventaja, es independiente de las condiciones ambientales, además es inmune a interferencia electromagnética, tiene bajo costo, no daña al ser humano. Las desventajas que tiene este medio de comunicación es que la distancia entre el sistema de control y el sistema controlado debe ser establecida de acuerdo al alcance de los sensores infrarrojos y además, se debe tener cuidado en la limpieza de los sensores.
Comunicación Combinada. Se usan ambos medios de comunicación. Con la consideración de incluir dispositivos llamados transductores que aseguran la comunicación entre los dos medios.
Para los medios anteriormente mencionados, se debe de tener en consideración que habrá algunos efectos sobre la comunicación, como es la degradación de la señal debido a que la línea de transmisión/recepción de datos puede tener factores que atenúan a la señal, para el caso de líneas de transmisión tales factores son conocidos técnicamente como parámetros distribuidos (resistencia distribuida, inductancia distribuida, capacitancia distribuida, etc.) e incluso también fomentan la pérdida de información en caso de no asegurar que haya comunicación entre el sistema que controla y el sistema controlado.
Tiempos de Retardo en los Sistemas de Telecontrol
Cuando se implanta un sistema de telecontrol, se presentan diferentes retardos de tiempo en su respuesta, esto es debido al medio de comunicación, tiempos de ejecución o por complejidad del algoritmo, etc. La latencia o retardo es el tiempo que transcurre desde el momento en que se origina la información en el emisor, se envía por el canal de comunicación y arriba al receptor. Los tiempos de retardo son conocidos también como retardo de transporte o tiempo muerto. Se pueden encontrar diversos tipos de retardos los cuales son (Hernando,2002):
El retardo afecta al control, al comportamiento del sistema remoto e incluso afecta a la información que es enviada/recibida por medio de los canales de comunicación (en forma de pérdida de datos). Esto ocasiona que sean desarrolladas técnicas para contrarrestar los efectos del retardo en los sistemas telecontrolados.
Telecontrol por Internet
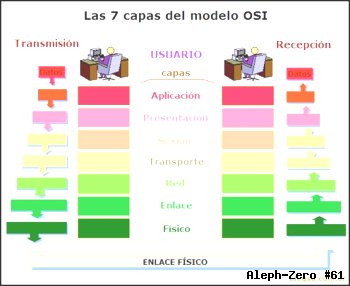
Para la transmisión de información en un medio de comunicación como el Internet se usa el modelo de comunicación de Interconexión de Sistemas Abiertos (Open System Interconnection OSI). El modelo OSI es un marco de referencia para la definición de formas de interconexión, y permite que sistemas de cómputo se interconecten e interoperen, gracias a reglas preestablecidas que deben ir cumpliéndose nivel a nivel, de los siete que existen en este modelo de referencia, para su total desempeño.
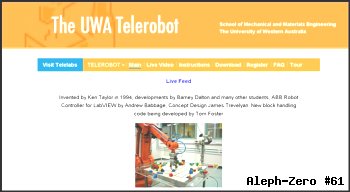
Para hacer el telecontrol mediante el Internet se debe tener en consideración que cada capa de comunicación entre el modelo OSI, aporta un tiempo de retardo, siendo las más significativas las cuatro primeras (física, enlace, red y transporte). En Internet, se pueden encontrar aplicaciones del Telecontrol, una de ellas se encuentra en la Universidad del Oeste de Australia, usa una interfaz de usuario gráfica elaborada en LABVIEW (que distribuye a través de su página de Internet (Uwa,2010)), usando el Internet para controlar un brazo mecánico auxiliándose de cámaras WEB. Es usado como equipo didáctico.
(Arena,2007) menciona una aplicación de robots controlados a distancia con fines médicos (telecirugía), el principal objetivo de este trabajo es investigar las ventajas de la visión estéreo en la tele operación de robots móviles. Y para ello, reconstruyen el espacio de trabajo del robot, para que se pueda desplazar, usando teleguías basadas en LASSER y en video (retroalimentación visual), en donde además se cuenta con una serie de sensores que ayudan a la tarea anteriormente mencionada.
Las interfaces HAPTIC, son sensores que dan lectura de la presión ejercida sobre un cuerpo y en (Petriu,2002) las usan. En este trabajo se mencionan las características de estas interfaces así como los alcances (sensores táctiles de presión y sensores visuales) y limites. Cabe mencionar que el uso de estos dispositivos, da un margen más amplio de control, ya que a pesar de las largas distancias que exis
ten entre la central de teleoperación y el dispositivo controlado se envía información al usuario de una forma eficiente, pues realmente “siente” lo que la máquina remota está haciendo o tocando.
En el trabajo de (Guerra,2006) se menciona los requerimientos necesarios para la implementación de una plataforma de teleoperación vía Internet, basada en software, costeable y de fácil instalación, aplicándose el telecontrol en un motor de inducción localizado en el IRCCyN en Nantes, Francia. En este caso, la planta a controlar es monitoreada usando servicios de “escritorios remotos”, y el sistema se manipula de esa manera (Figura 5).
Estas aplicaciones tienen como fin controlar un sistema físico y se pueden registrar retardos de una larga duración (hasta de 20 minutos), los cuales son minimizados ya sea usando cámaras
WEB, sensores e incluso usando escritorios remotos. Para el caso de una sonda espacial que es lanzada a un planeta distante, la comunicación entre el mando central y esta sonda puede tardar desde 8 minutos hasta 45 minutos (ya que depende de la posición de la tierra e incluso del planeta distante) y en algunos puntos debido a interferencias destructivas, se puede perder comunicación con la sonda espacial, para minimizar los efectos del retardo se usó una combinación de los ejemplos anteriores.
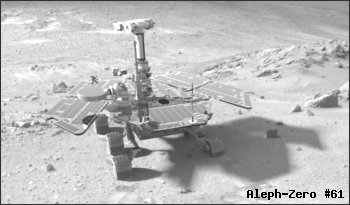
Los robots Spirit and Opportunity de "Mars exploration rover mission (Marsrovers,2009)", contaban con una serie de sensores y cámaras tipo estéreo las cuales recopilaban información para alimentar a un software de autonavegación. Permitiendo que el robot elaborara una serie de rutas alternativas para así elegir las más apropiadas para llegar a un destino determinado, tomando en consideración los siguientes factores: rugosidad del terreno, obstáculos en la ruta, seguridad para el robot, ángulo de inclinación del terreno, etc.
Opportunity usó la autonavegación para cubrir una distancia de 230 metros (entre los cráteres "Eagle" y "Endurance") mientras que Spirit cubrió una distancia de 1250 metros para dirigirse a "Columbia Hills".
Conclusiones
Las telecomunicaciones han sido objeto de la constante revolución tecnológica causada por la afanosa búsqueda de la humanidad que tiene como desde la invención del Telekino hasta la creación del Internet han transcurrido varios años, y lo que antes parecía ser imposible hoy es una completa realidad, el telecontrol y las telecomunicaciones comenzaron siendo solo un sueño, pero gracias a las personas que dedican su vida completa al desarrollo tecnológico hoy forma parte de nuestra realidad e indudablemente nos ha facilitado en gran medida la vida diaria.
Dr. en C. Jorge Salvador Valdéz Martínez
Ingeniero en Comunica-ciones y Electrónica egre-sado de la Escuela Superior de Ingeniería Mecánica y Eléctrica del IPN, Maestro en Tecnología Avanzada por el Centro de Investigación en Ciencia Aplicada y Tec-nología Avanzada del IPN y candidato Doctor en Cien-cias en Comunicaciones y Electrónica por la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Culhuacan. Sus áreas de interés son Sistemas en Tiempo Real y sistemas de control.
C. M. en C. Gustavo Delgado Reyes
Ingeniero en Comunicaciones y Electrónica egresado de la Escuela Superior de In-geniería Mecánica y Eléctrica del IPN y estudiante de la Maestría en Ingeniería en Microelectrónica de la misma escuela. Actualmente es becario del CONACyT y forma parte del Programa Insti-tucional de Formación de Investigadores. Sus áreas de interés son Sistemas en Tiempo Real, Sistemas Embebi-dos y Teoría de Control.
Dr. Pedro Guevara López
Doctor y Maestro en Ciencias de la Computación e In-geniero Electricista, todos del Instituto Politécnico Na-cional, Doctor en Filosofía de la Educación Iberoamericana por el Consejo Iberoameri-cano en Honor a la Calidad Educativa. Es Profesor Inves-tigador de la Escuela Superior de Ingeniería Mecánica y Eléctrica y Profesor Invitado del Centro de Investigación en Ciencia Aplicada y Tec-nología Avanzada pertenecientes al Instituto Poli-técnico Nacional. Sus áreas de investigación son: Siste-mas en Tiempo Real, Modelado de Sistemas Dinámicos e Investigación Educativa.

Divulgadores. R. C Zepeda-gurrola + ; X. Guo + Centro De Biotecnología Genómica, Instituto Politécnico Nacional.
Divulgadores. Raymundo Huizar Alma Rosa + Universidad de Guadalajara. Centro Universitario de la Costa. Departamento de Ciencias Biológicas. Av. Universidad #203. Delegación Ixtapa. Puerto Vallarta, 48280. Jalisco, México; Mirella Saucedo Lozano + Universidad de Guadalajara. Centro Universitario de la Costa Sur. Departamento de Estudios para el Desarrollo Sustentable de Zonas Costeras. Gómez Farías #82, San Patricio-Melaque.48980. Jalisco, México; Victor Landa Jaime + Universidad de Guadalajara. Centro Universitario de la Costa Sur. Departamento de Estudios para el Desarrollo Sustentable de Zonas Costeras. Gómez Farías #82, San Patricio-Melaque.48980. Jalisco, México; Rafael García de Quevedo- Machaín + Universidad de Guadalajara. Centro Universitario de la Costa. Departamento de Ciencias Biológicas. Av. Universidad #203. Delegación Ixtapa. Puerto Vallarta, 48280. Jalisco, México.
Divulgadores. José Adán Vizcaíno Reséndiz + Centro Universitario de Ciencias de la salud, Universidad de Guadalajara; Christian Fernando García Flores + Centro Universitario de los Altos, Universidad de Guadalajara; Jaime Humberto Ramírez Hernández +Facultad de odontología, Universidad Veracruzana; Francisco Javier Gutiérrez Cantú +; Humberto Mariel Murga +; Jairo Mariel Cárdenas 4 + Facultad de Estomatología, Universidad Autónoma de San Luis Potosí; Sonia Villagrán Rueda + Escuela de Psicología, Universidad Autónoma de Zacatecas;.
Divulgadores. Nadia Diana Guido Cira + Centro De Biotecnología Genómica, Instituto Politécnico Nacional.
Divulgadores. Je Telich-tarriba + Escuela De Medicina, Universidad Panamericana, México; Me Loredo-mendoza + Escuela De Medicina, Universidad Panamericana, México; R Bolaños-jiménez + Escuela De Medicina, Universidad Panamericana, México.
Editorial. Dr. Miguel Ángel Méndez Rojas +;.
Editorial. Redacción.
Innovadores. Alejandro Israel Barranco Gutiérrez + ; María Del Pilar Vázquez Flores + Instituto TecnolÓgico De TlÁhuac.
Investigacion. B. Cruz-romero + Instituto Tecnológico De Bahía De Banderas; J. Téllez-lópez + ; F. Maciel-carrillo + ; Ma. Del C. Navarro-rodríguez + ; J.c. Morales-hernández + Centro Universitario De La Costa. Universidad De Guadalajara.
Investigación. César E. Escamilla Ocañas + Laboratorio De Ingeniería Tisular Y Medicina Regenerativa De La Universidad De Monterrey; Héctor Martínez Menchaca + Laboratorio De Ingeniería Tisular Y Medicina Regenerativa De La Universidad De Monterrey; Gerardo Rivera Silva + Laboratorio De Ingeniería Tisular Y Medicina Regenerativa De La Universidad De Monterrey.
Tecnólogos. Jorge Salvador Valdez Martínez + ; Gustavo Delgado Reyes + Escuela Superior De Ingeniería Mecánica Y Eléctrica Unidad Culhuacan– Ipn; Pedro Guevara López + Centro De Investigación Ciencia Aplicada Y Tecnología Avanzada Unidad Legaria – Ipn.
Tecnólogos. Jorge Salvador Valdez Martínez + ; Pedro Guevara López + ; Juan Carlos Sánchez García + Escuela Superior De Ingeniería Mecánica Y Eléctrica, Unidad Culhuacán– Ipn.